Lovat
In FIRST Robotics Competition, it’s common practice to “scout” other teams by watching their robots play and recording data about their performance.
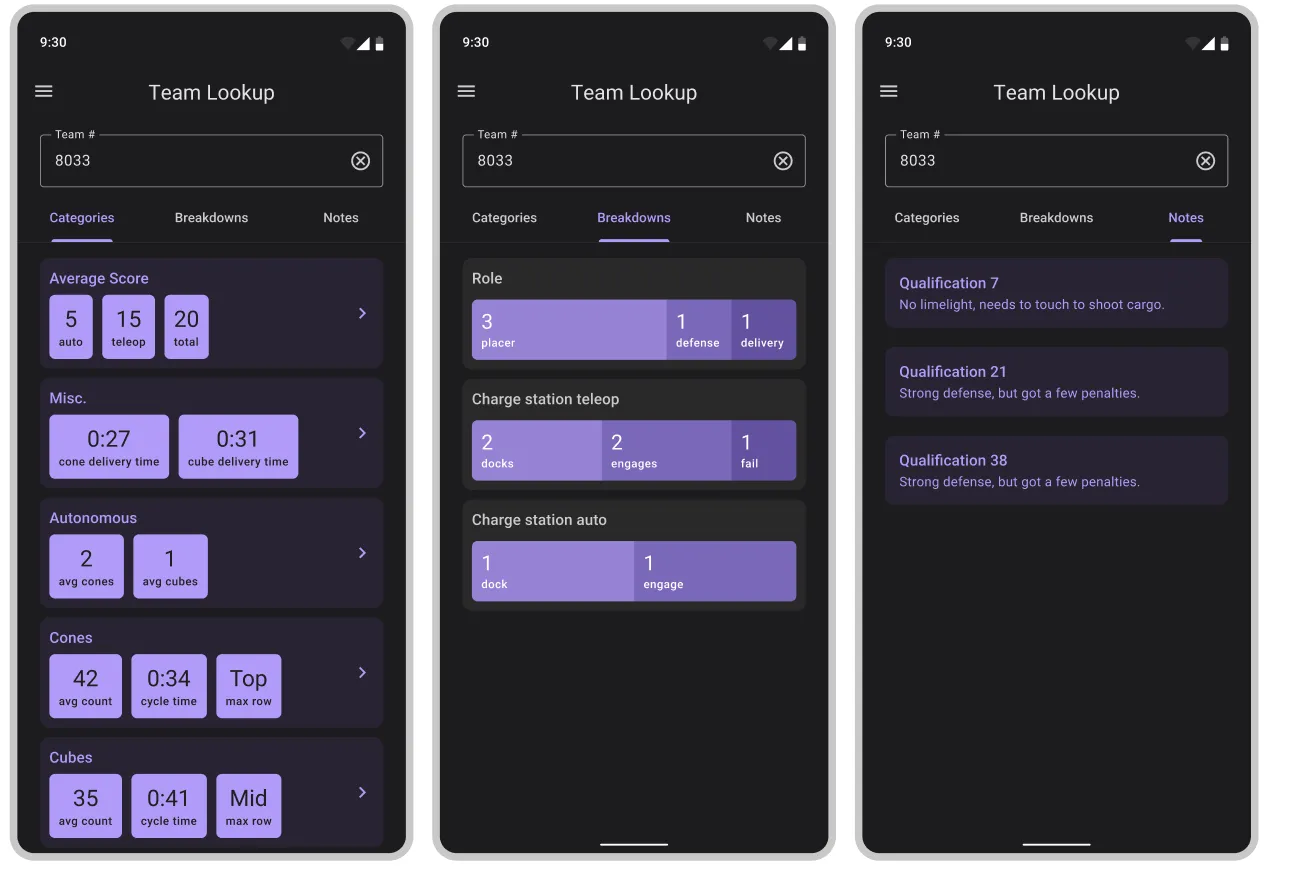
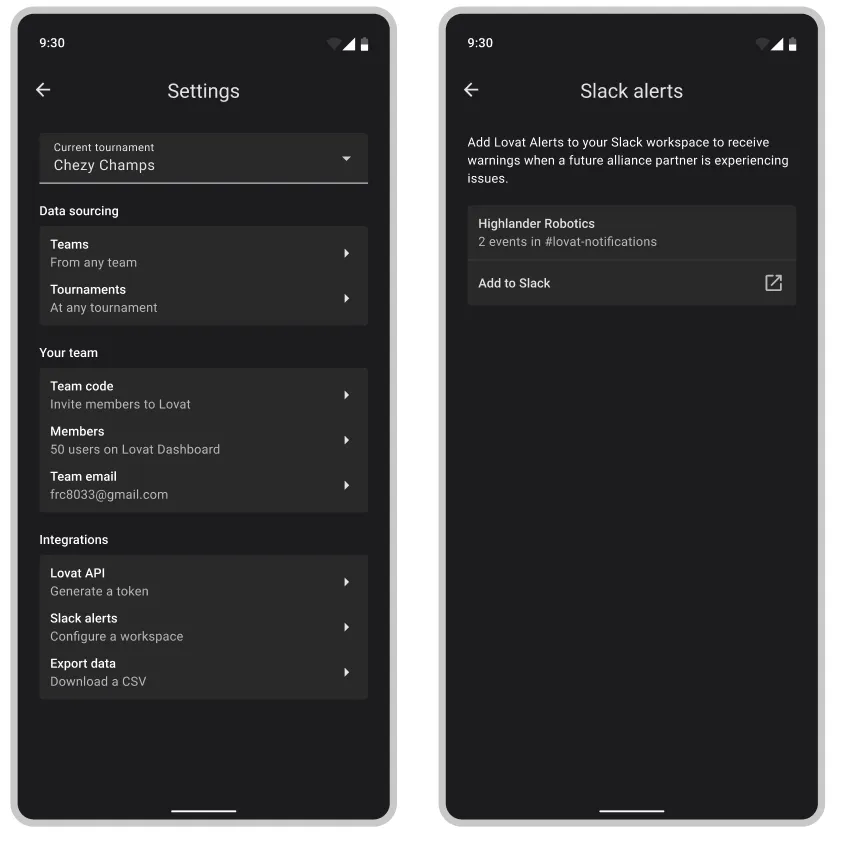
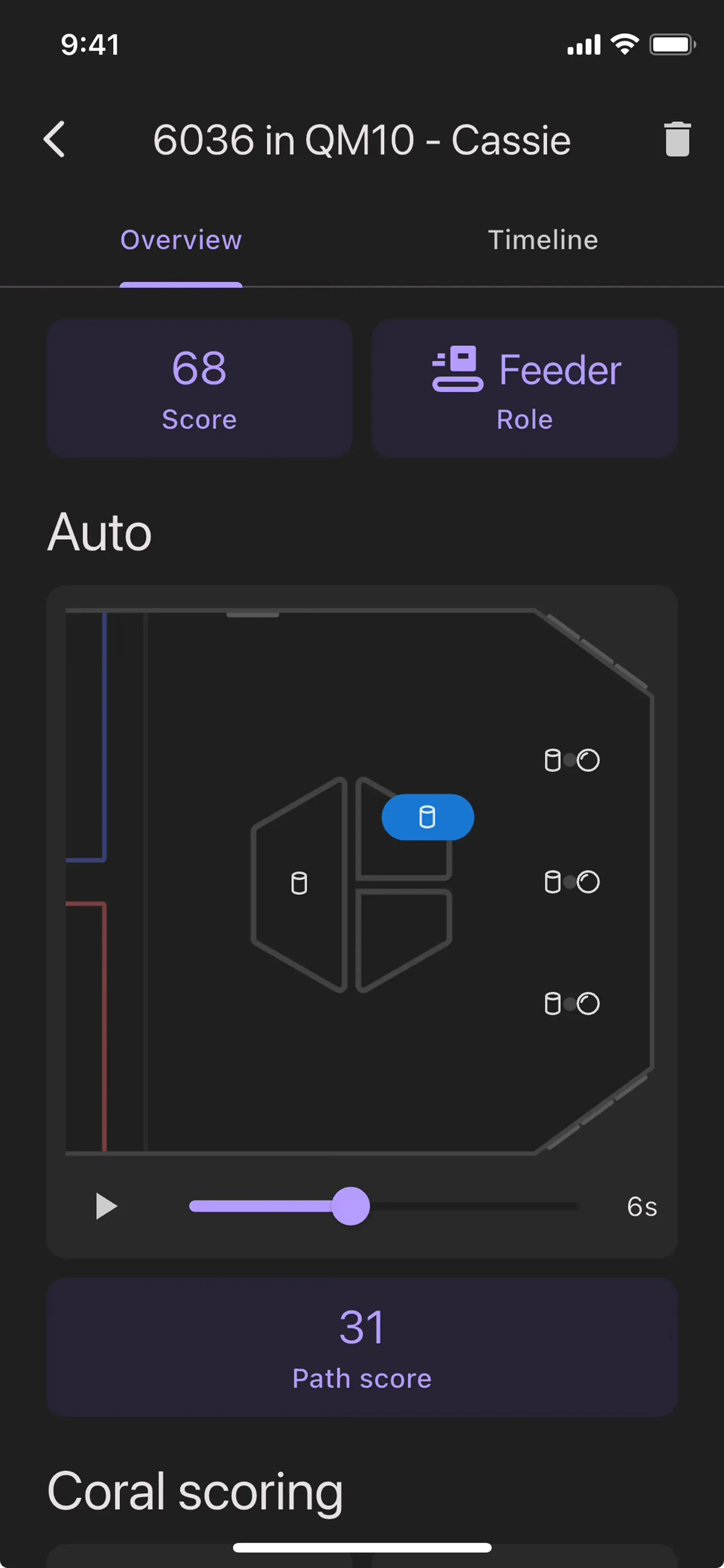
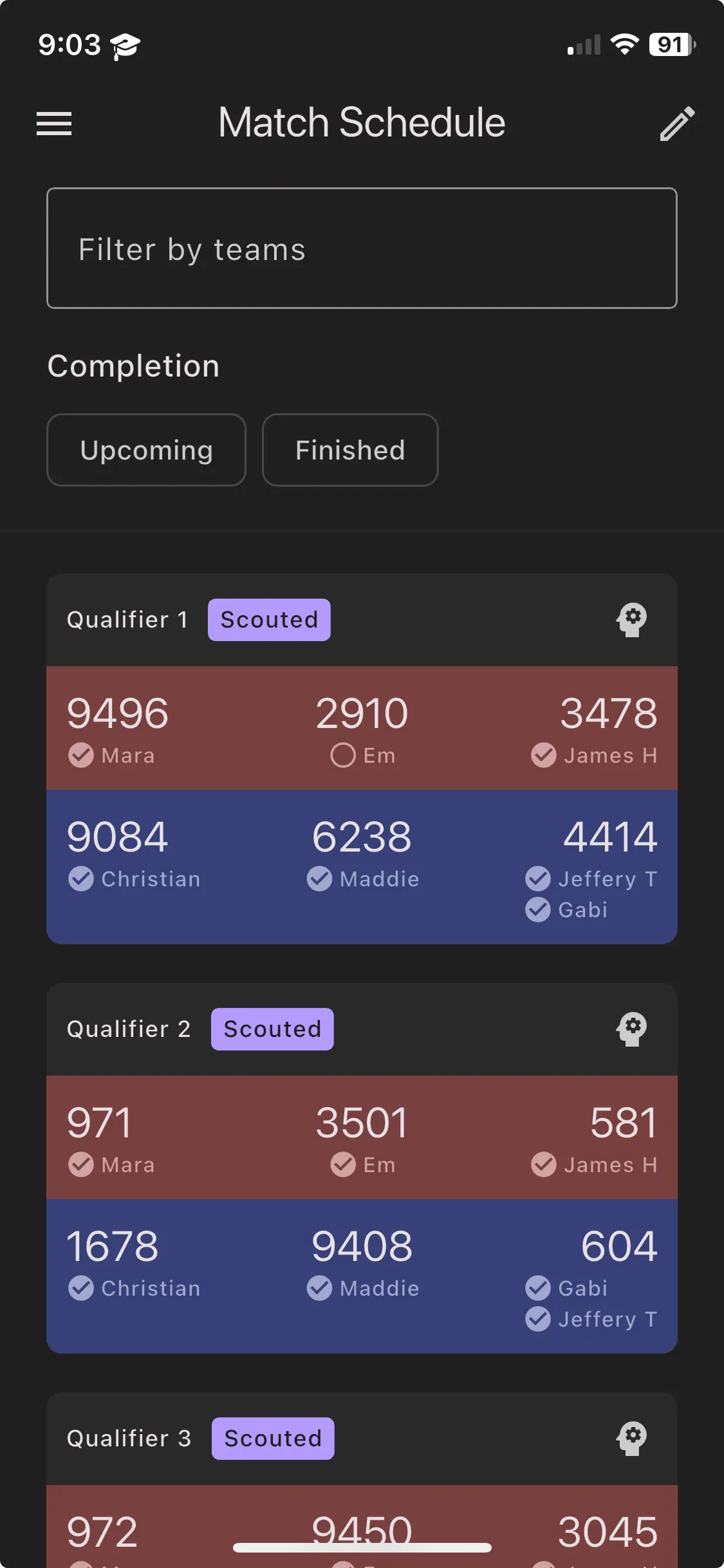
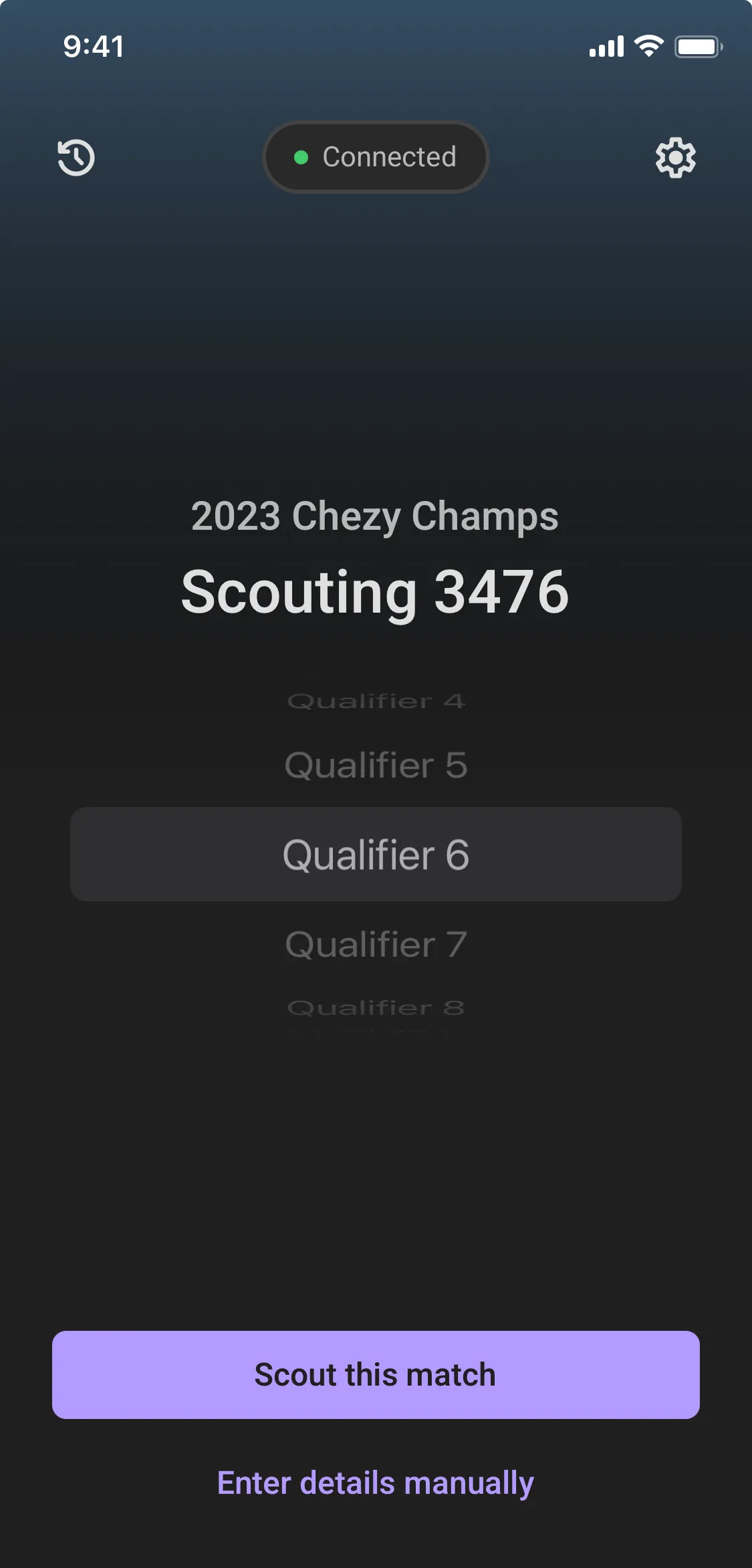
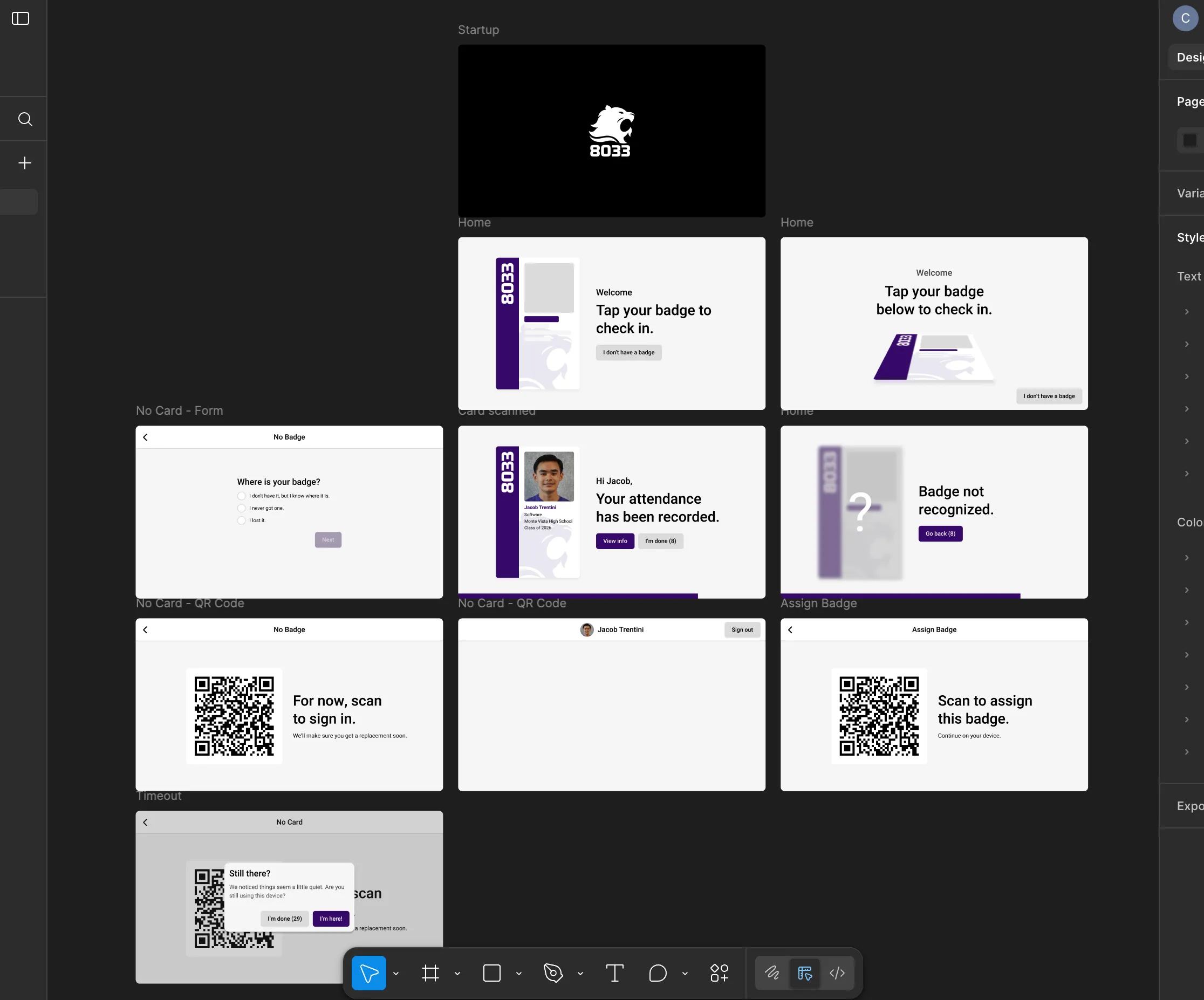
Lovat is an FRC scouting system I’ve been working on for all four years of high school alongside a rotating, very talented cast of teammates. The idea started at my first competition and after a year of internal use, it was published for other teams to use. There are two apps in the system: Dashboard, which helps plan operations and visualize analyzed data, and Collection, where scouters input it.
Dashboard is implemented in Flutter, and Collection is in React Native. They both connect to a centralized Express.js server which stores data in a PostgreSQL database.
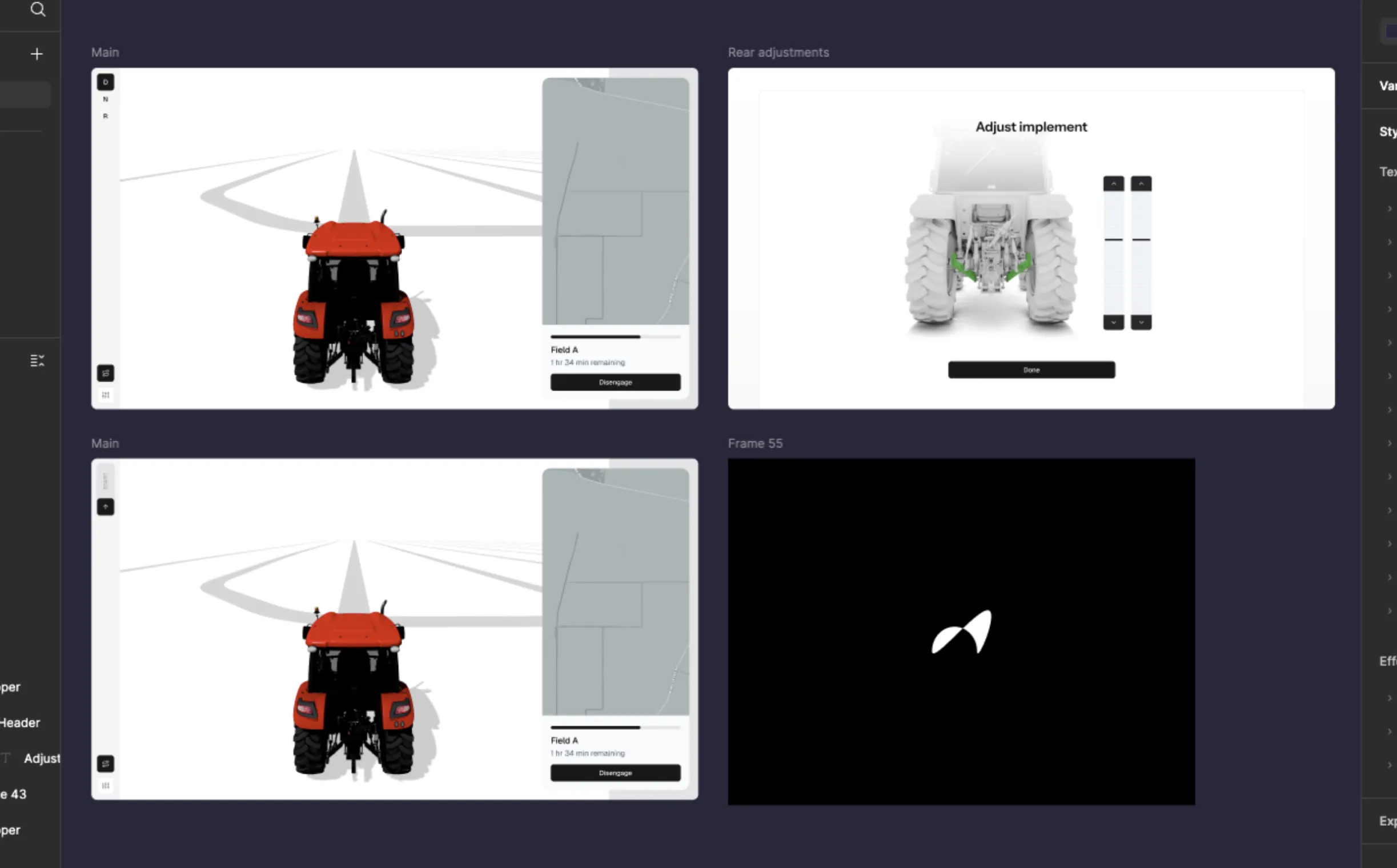
Shown here are screenshots of my original design for the Lovat Dashboard in Figma, along with the published implementation used by over 800 teams at 83% of competitions globally.